














Buscador global












Mostrando del 401 al 410 de 920 resultados para: Classroom: gestor de nuestras actividades de aula filtrando por: E.S.O.
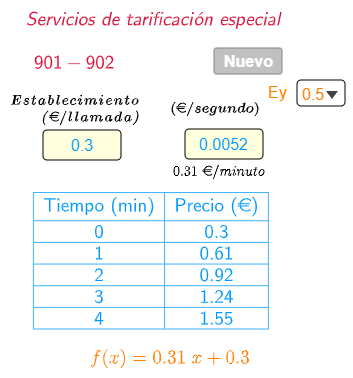
Función lineal: Llamadas telefónicas
En esta actividad se muestra un ejemplo de función de lineal que podemos encontrar en la vida cotidiana: "Coste de llamadas telefónicas a ciertos números especiales". Para una tarifa determinada se obtiene una tabla de valores, la fórmula, representación gráfica y la pendiente de la recta.
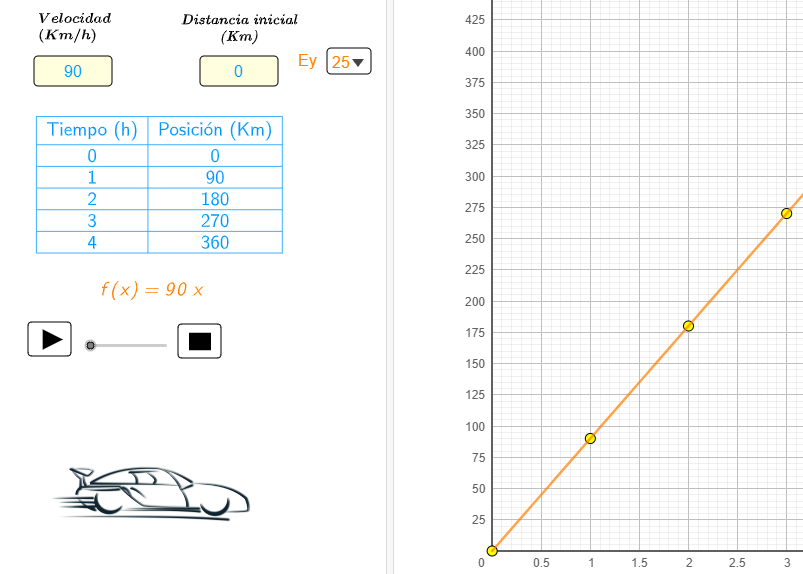
Función lineal: Viajes a rapidez constante
En esta actividad se muestra un ejemplo de función de lineal que podemos encontrar en la vida cotidiana: "Distancia recorrida por un móvil que se desplaza a velocidad constante". Para una rapidez determinada se obtiene una tabla de valores, la fórmula, representación gráfica y la pendiente de la recta.
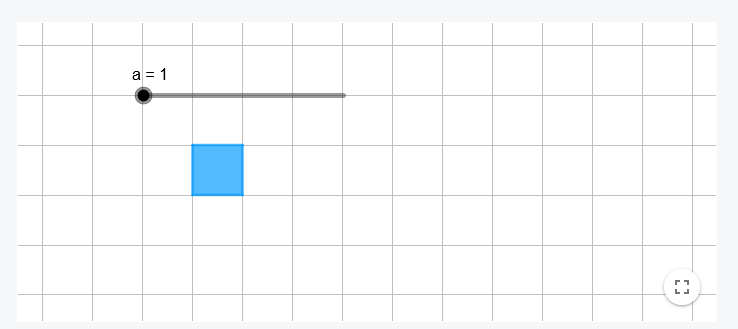
Actividad rectángulo variable
Actividad que presenta una investigación sobre la relación entre el perímetro de un rectángulo formado por cuadrados contiguos y el número de cuadrados que forman el rectángulo.
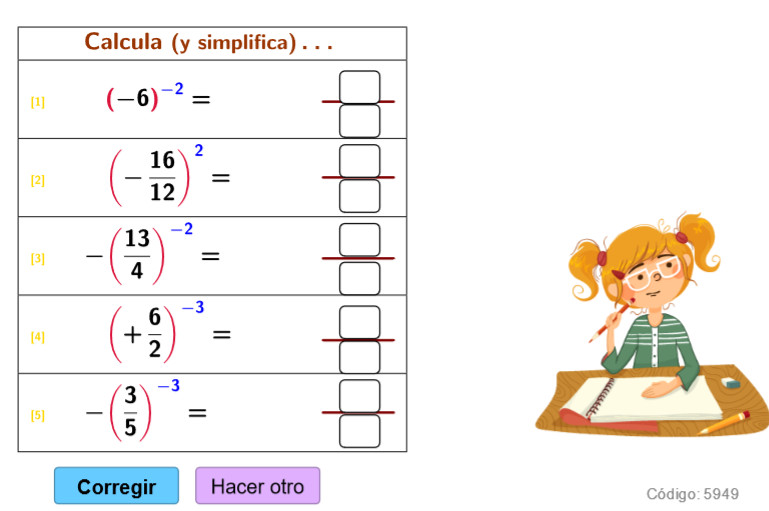
Potencias de fracciones con signos en las bases y exponentes
Potencias de fracciones con signos en las bases y exponentes.
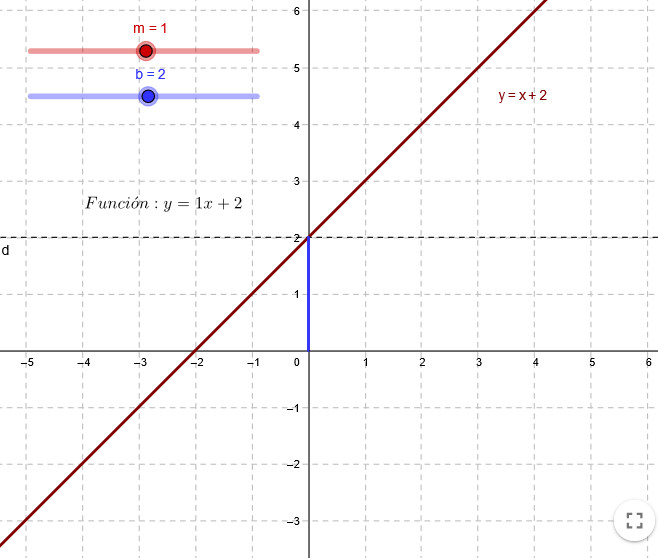
Parámetros en la función lineal y = mx + b
Permite analizar el comportamiento que sufre la gráfica de la función lineal, y = mx + b, al cambiar sus parámetros.
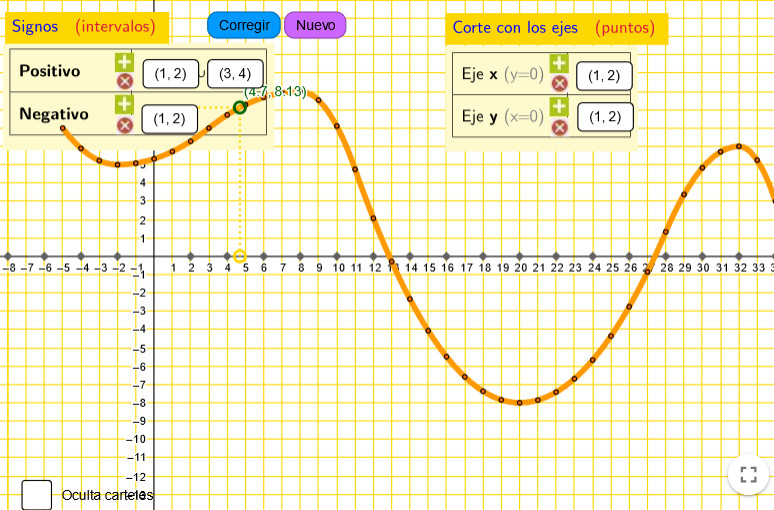
Signos y corte con los ejes
Applet que permite entender de forma visual el signo de una función y sus puntos de corte con los ejes.
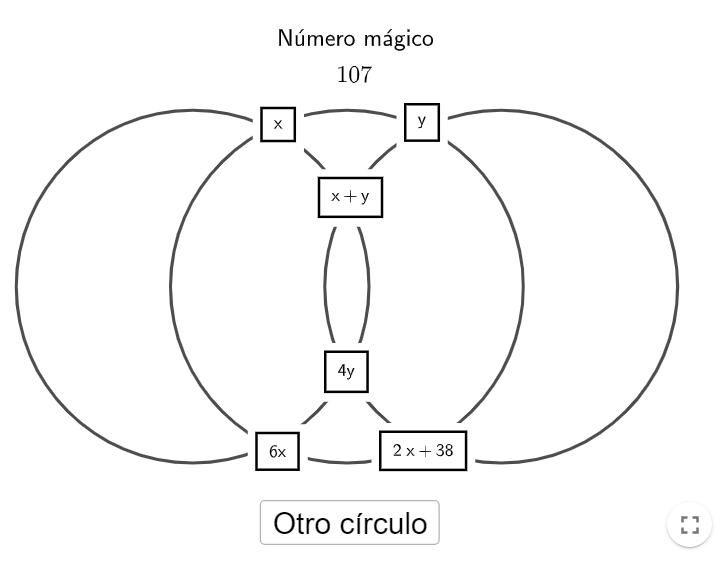
Círculos mágicos
Actividad que presenta tres círculos mágicos. Los números situados en cada una de las tres circunferencias deben sumar lo mismo, es el número mágico.
Proporcionalidad inversa
Se proponen una serie de problemas de proporcionalidad inversa que el alumnado habrá de hacer en el cuaderno. El applet demanda la solución e indica si está bien o mal. También se puede ver la regla de tres utilizada. Además el recurso acumula la puntuación conseguida por el usuario.
Proporcionalidad directa
Se proponen una serie de problemas de proporcionalidad directa que el alumnado habrá de hacer en el cuaderno. El applet demanda la solución e indica si está bien o mal. También se puede ver la regla de tres utilizada. Además el recurso acumula la puntuación conseguida por el usuario.
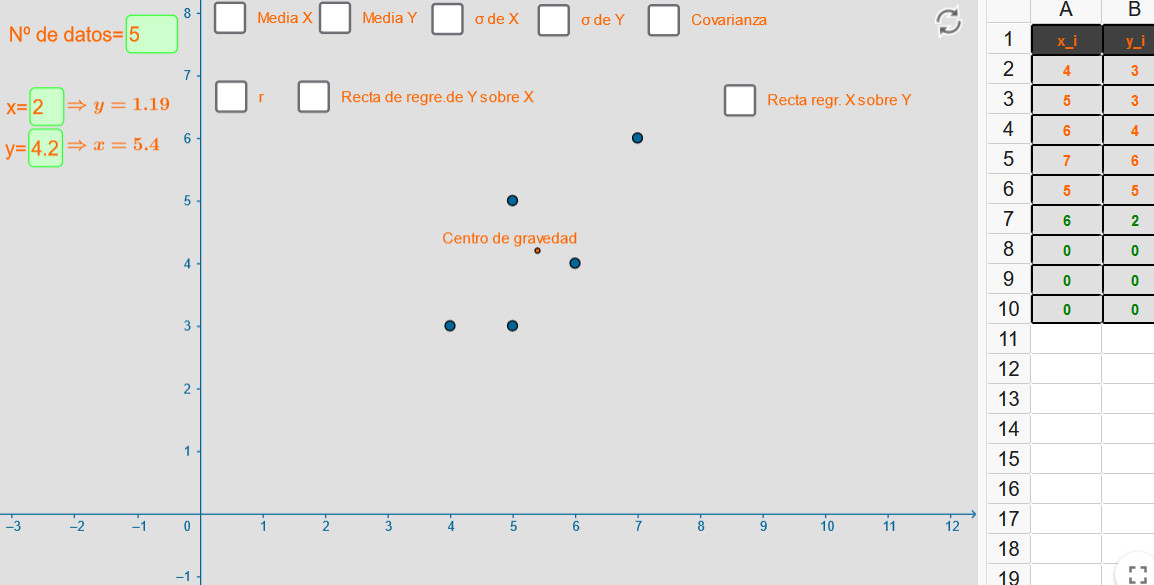
Distribución bidimensional I
Applet de GeoGebra que te permite realizar un estudio estadístico bidimensional: tabla, medias, desviaciones, covarianza y rectas de regresión.